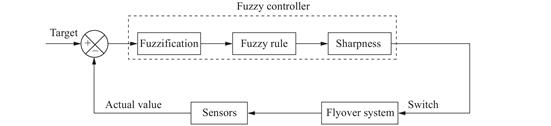
在空间探测任务中, 探测器的姿态控制是保证各项任务完成的基础, 虽然探测器的着陆控制技术已日趋成熟, 但地外起飞阶段的姿态控制研究还相对较少. 本文设计了一种适用于深空探测器在外星不确定性环境下起飞时的模糊控制器, 通过对姿态角与角速度进行分档模糊化处理降低计算量; 建立将姿态角和角速度映射到输出力矩的模糊控制规则; 根据模糊规则输出的模糊量, 通过去模糊化得到控制器的开关状态输出, 实现对探测器姿态的快速有效控制. 利用数值仿真测试了控制器的控制效果, 以及在起飞初始姿态和发动机安装存在偏差时的鲁棒性, 在ADAMS环境下对探测器起飞过程进行物理仿真. 结果表明, 相比于经典PD控制方法在实际模型与理想模型有差别时导致的控制发散, 该控制器在参数不确定下具有更强的鲁棒性, 满足了深空探测器自主起飞时对姿态控制的需求.
In space exploration missions, attitude control is the basis to ensure the completion of various tasks, especially in the take-off and landing stage plays a key role. Although the landing control technology of the spacecraft is becoming more and more mature, the attitude control of the extraterrestrial take-off stage is still less studied. In this paper, a fuzzy controller is designed for the launch of a deep space probe in the alien uncertain environment. Firstly, the detector model used in this paper is summarized, and the attitude description method and corresponding kinematic equation are given. Then, according to the fuzzy control principle, the fuzzy control rules which map the attitude Angle and angular velocity to the output torque are established. Finally, the fuzzy attitude Angle and angular velocity are taken as the input, and the corresponding fuzzy output is obtained according to the fuzzy rule, and the switch state output of the controller engine is obtained by deblurring, so as to realize the fast and effective control of the detector attitude. Then, numerical simulation was used to test the control effect of the controller and its robustness when there is a deviation between the initial attitude and the engine installation. Finally, physical simulation of the probe take-off process was carried out in ADAMS environment combined with Simulink module. According to the above analysis and simulation, the results show that compared with the control divergence caused by the classical PD control method when the actual model is different from the ideal model, the controller has stronger robustness under parameter uncertainty, and meets the demand for attitude control during the autonomous take-off of deep space probes. This study provides an effective fuzzy control scheme for extraterrestrial liftoff, which provides a theoretical and methodological basis for further research.