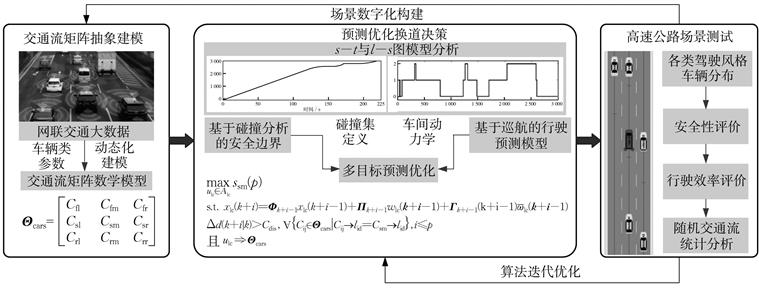
换道决策是智能网联汽车的核心难题之一,其面临着高动态、复杂交通场景下需要综合考虑行驶安全及效率等目标的巨大挑战。提出一种多目标预测优化的换道决策方法,主要包括动力学矩阵建模及多目标预测优化问题解算。基于智能网联汽车的通讯大数据信息构建交通流矩阵模型,然后分别设计表征车辆换道安全、行驶效率的动力学模型,通过多目标综合预测优化方法,求解条件约束下预测优化问题从而优化出最优换道决策指令。结果表明,所提出的预测优化换道方法较其他方法提高了智能汽车的行驶安全性和效率。
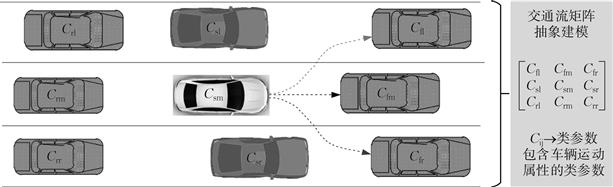
Lane change decision-making is one of the current opening challenges of automated and connected vehicles. Due to highly dynamic and complex traffic situations, multi-objective decision-making considering vehicle safety and riding efficiency is much more challenging. Therefore, this paper proposes a novel multi-objective predictive optimization-based lane change decision making method, which consists of dynamic matrix modeling and resolving of multi-objective predictive optimization problem. First, the matrix model of traffic flow is established based on the big data information from connected vehicles.
Then, dynamic models representing lane change safety and riding efficiency are designed. The predictive optimization problem with constraints can be solved so that the optimal lane change decision is provided. Experimental results illustrate that the proposed method performs better and can improve vehicle safety and riding efficiency of automated and connected vehicles.